OpenGL Lookat to Axes
Related Topics: OpenGL Camera, Angles to Axes, Rotation About Axis
NOTE: This page is constructing a rotation matrix for object's lookat, not for camera. If you look for camera's lookat, please visit Camera LookAt page.
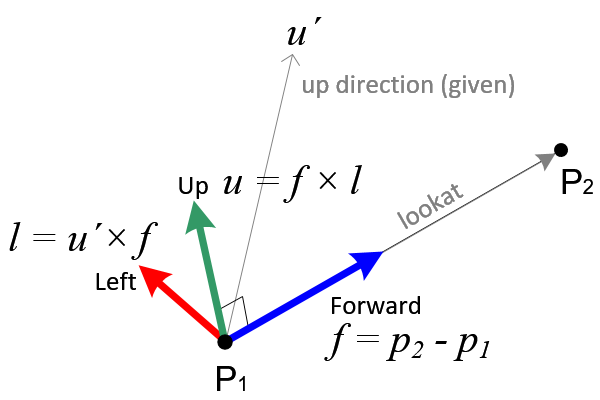
The rotation matrix can be constructed by a lookat vector with 2 or 3 points in 3D space. If an object at P1 is facing to P2, then the lookat vector is P2 - P1.
First, Forward axis vector is simply calculated by normalizing the lookat vector.
Second, left axis vector is computed by a cross product of a specified up direction vector and forward axis. This up direction vector is given to determine the roll angle of the object. And, it is not necessary perpendicular to the forward axis. If we don't consider roll rotation of the object, then we can use (0, 1, 0) instead. It means the object is always stood straight up.
The actual up axis vector, which is orthogonal to both forward and left axis, is computed by another cross product of forward and left. Both left and up axis should be normalized after cross product in order to have a unit length.
Here is a C++ example to calculate left, up and forward axis from a lookat vector. The first code block is a minimal implementation of Vector3 struct variable. The second code block is to compute 3 axes from 2 points (position and target vectors), and the last code block is to compute 3 axes from 3 points (position, target and up direction vectors).
// minimal implementation of Vector3 struct
struct Vector3
{
float x;
float y;
float z;
Vector3() : x(0), y(0), z(0) {}; // constructors
Vector3(float x, float y, float z) : x(x), y(y), z(z) {};
// functions
Vector3& normalize(); //
Vector3 operator-(const Vector3& rhs) const; // subtract rhs
Vector3 cross(const Vector3& rhs) const; // cross product
};
Vector3& Vector3::normalize() {
float invLength = 1 / sqrtf(x*x + y*y + z*z);
x *= invLength;
y *= invLength;
z *= invLength;
return *this;
}
Vector3 Vector3::operator-(const Vector3& rhs) const {
return Vector3(x-rhs.x, y-rhs.y, z-rhs.z);
}
Vector3 Vector3::cross(const Vector3& rhs) const {
return Vector3(y*rhs.z - z*rhs.y, z*rhs.x - x*rhs.z, x*rhs.y - y*rhs.x);
}
///////////////////////////////////////////////////////////////////////////////
// compute transform axis from object position and target point
///////////////////////////////////////////////////////////////////////////////
void lookAtToAxes(const Vector3& position, const Vector3& target,
Vector3& left, Vector3& up, Vector3& forward)
{
// compute the forward vector
forward = target - position;
forward.normalize();
// compute temporal up vector based on the forward vector
// watch out when look up/down at 90 degree
// for example, forward vector is on the Y axis
if(fabs(forward.x) < EPSILON && fabs(forward.z) < EPSILON)
{
// forward vector is pointing +Y axis
if(forward.y > 0)
up = Vector3(0, 0, -1);
// forward vector is pointing -Y axis
else
up = Vector3(0, 0, 1);
}
// in general, up vector is straight up
else
{
up = Vector3(0, 1, 0);
}
// compute the left vector
left = up.cross(forward); // cross product
left.normalize();
// re-calculate the orthonormal up vector
up = forward.cross(left); // cross product
}
///////////////////////////////////////////////////////////////////////////////
// compute transform axis from object position, target and up direction
///////////////////////////////////////////////////////////////////////////////
void lookAtToAxes(const Vector3& pos, const Vector3& target, const Vector3& upDir,
Vector3& left, Vector3& up, Vector3& forward)
{
// compute the forward vector
forward = target - pos;
forward.normalize();
// compute the left vector
left = upDir.cross(forward); // cross product
left.normalize();
// compute the orthonormal up vector
up = forward.cross(left); // cross product
}
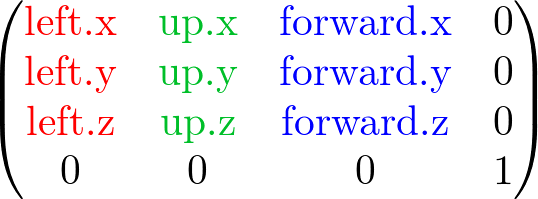
Once all 3 axes are computed, you can construct a rotation matrix by replacing 3 columns of 4x4 matrix.