OpenGL Rotation About Arbitrary Axis
Related Topics: OpenGL Matrix, Quaternion to Matrix, Angles To Axes, Lookat To Axes
Download: rotate.zip
Derive Rodrigues' Formula
The 4x4 transformation matrix for rotating about an arbitrary axis in OpenGL is defined as;
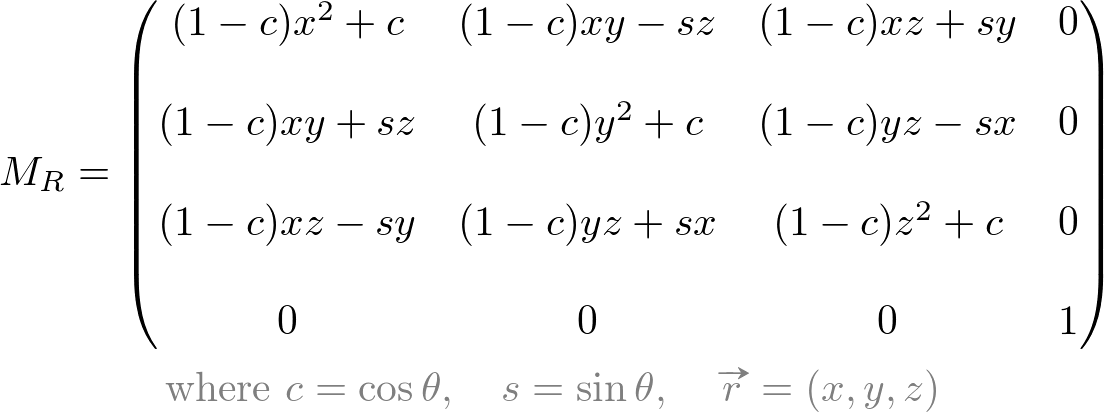
This page explains how to derive this rotation matrix from Rodrigues' rotation formula. Suppose a 3D point P is rotating to Q by an angle ![]() along a unit vector
along a unit vector ![]() . The vector form of P is broken down the sum of
. The vector form of P is broken down the sum of ![]() and
and ![]() , and Q is the sum of
, and Q is the sum of ![]() and
and ![]() respectively;
respectively;
![]() ,
, ![]()
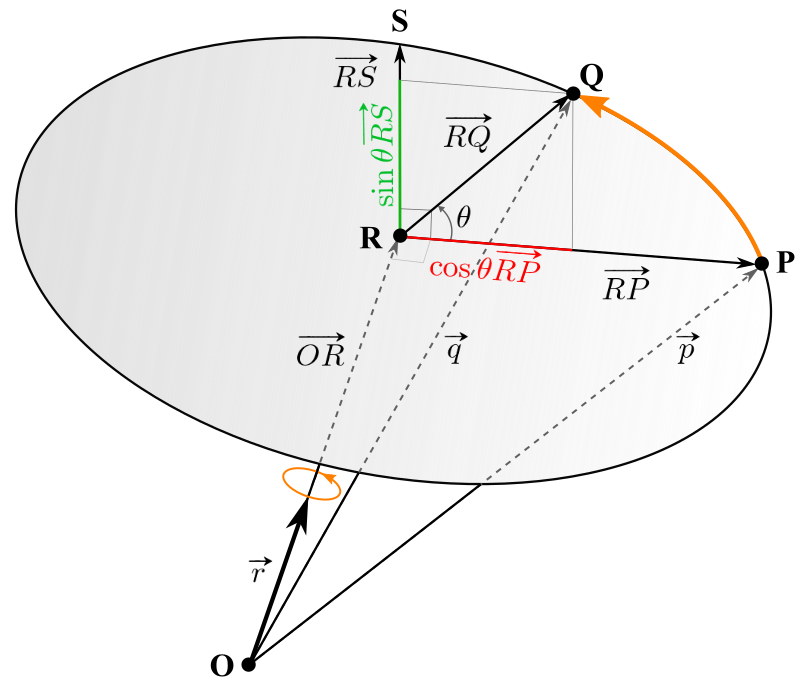
![]() can be determined by 2 basis vectors on the rotation plane. We use
can be determined by 2 basis vectors on the rotation plane. We use ![]() as the first basis vector, and the other basis vector
as the first basis vector, and the other basis vector ![]() is perpendicular to
is perpendicular to ![]() and has equal length because they are both the radius of the circluar plane. Therefore,
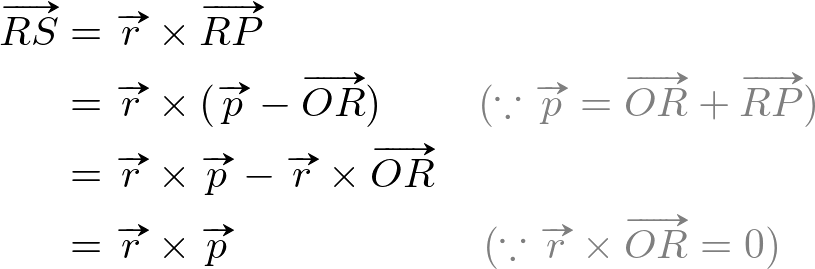
and has equal length because they are both the radius of the circluar plane. Therefore, ![]() can be computed by the cross product of 2 perpendicular vectors;
can be computed by the cross product of 2 perpendicular vectors; ![]() and
and ![]() ;
;
Now, ![]() is represented with the composition of these basis vectors and trigonometric functions;
is represented with the composition of these basis vectors and trigonometric functions;
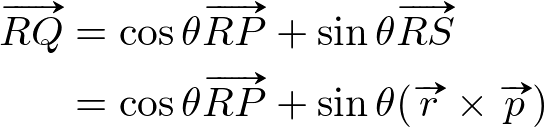
Finally, the rotated vector ![]() is written by the sum of
is written by the sum of ![]() and
and ![]() ;
;
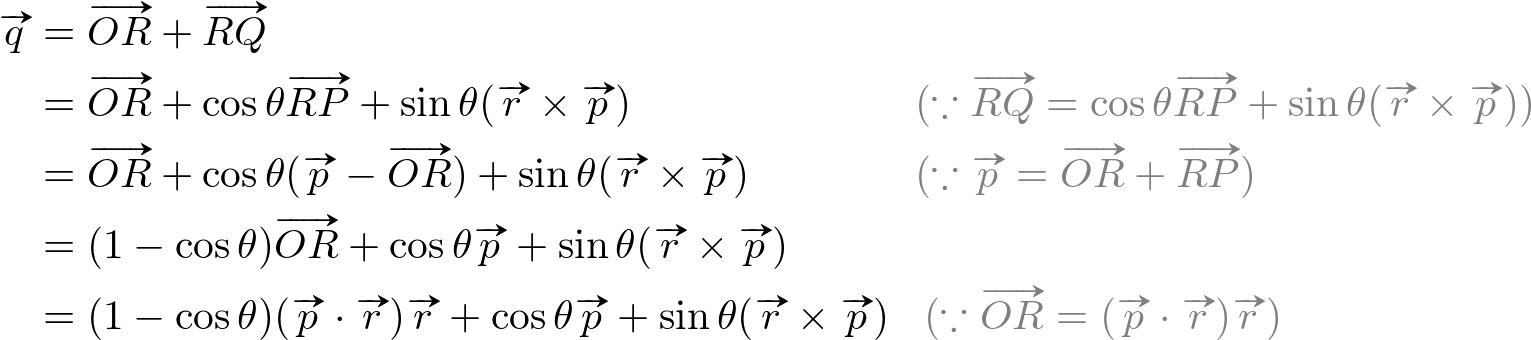
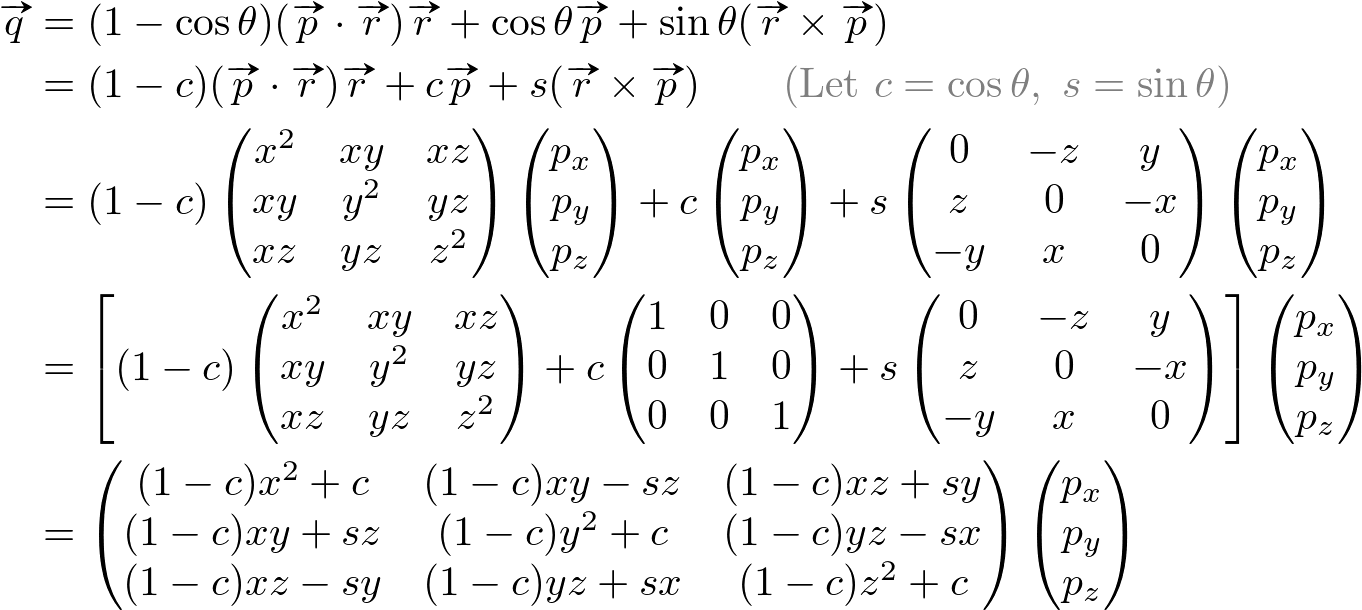
This equation is called Rodrigues' rotation formula;
![]()
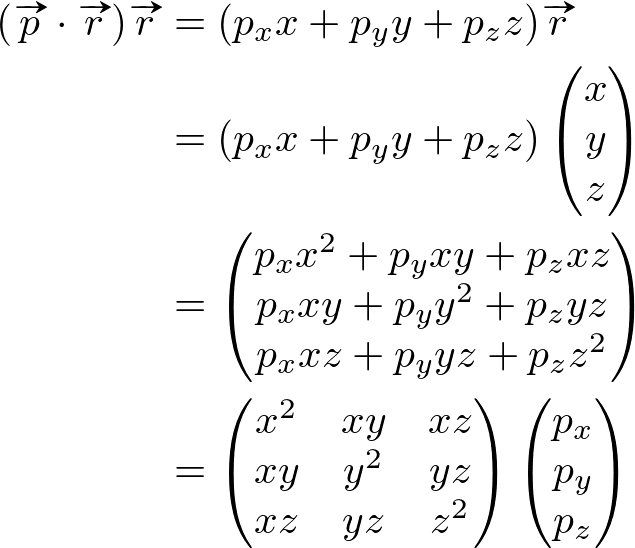
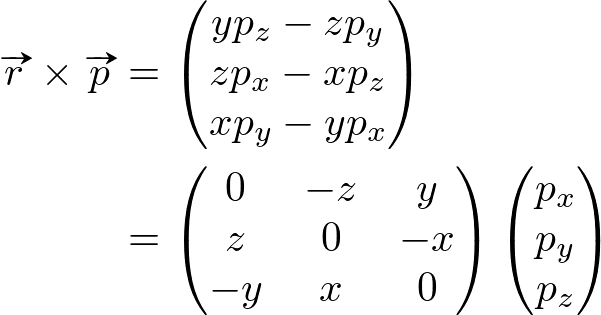
It can be represented by an equivalent matrix form. First, convert ![]() and
and ![]() components to 3x3 matrix forms for P = (px, py, pz) and r = (x, y, z);
components to 3x3 matrix forms for P = (px, py, pz) and r = (x, y, z);
Finally, the equivalent matrix form by substituting the above matrix components is;
And, the 3x3 rotation matrix alone is
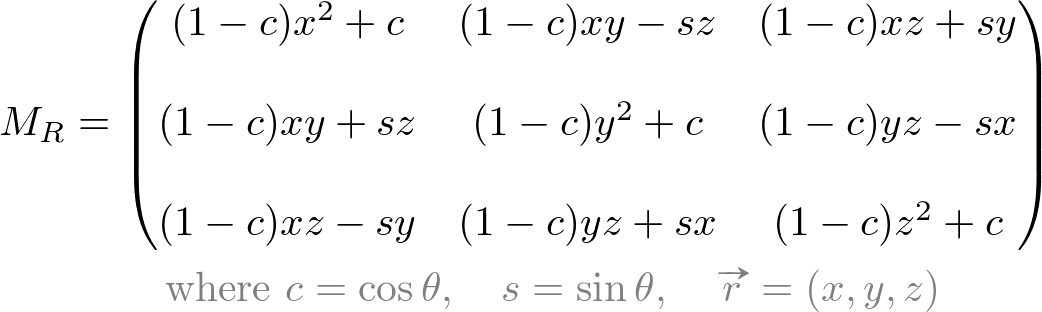
Or, as 4x4 matrix;
Example: Rodrigues' Rotation Formula
The following C++ code snippet is rotating a 3D point P to Q along the rotation axis ![]() using Rodrigues' formula. Download the complete implementation from rotate.zip (Updated: 2025-10-23).
using Rodrigues' formula. Download the complete implementation from rotate.zip (Updated: 2025-10-23).
![]()
// minimal implementation of Vector3
struct Vector3
{
float x, y, z;
// ctor
Vector3() : x(0), y(0), z(0) {}
// inner and cross products
float dot(Vector3& v) { return x*v.x + y*v.y + z*v.z; }
Vector3 cross(Vector3& v) { return Vector3(y*v.z-z*v.y, z*v.x-x*v.z, x*v.y-y*v.x); }
// scalar product
friend Vector3 operator*(float s, Vector3 v) { return Vector3(s*v.x, s*v.y, s*v.z); }
Vector3& normalize() {
float invLength = 1.0f / sqrtf(x*x + y*y + z*z);
x *= invLength;
y *= invLength;
z *= invLength;
return *this;
}
}
...
// define the rotation vector r and angle
Vector3 r = Vector3(1, 1, 1).normalize(); // make unit length
float a = 30 / 180 * PI; // rotation angle as radian
// define a vector P to rotate
Vector3 p = Vector3(1, 2, 3);
// compute the rotated vector Q using Rodrigues' formula
Vector3 q = (1 - cos(a)) * p.dot(r) * r + cos(a) * p + sin(a) * r.cross(p);